ServoTimer: Движение робота
Как работает:
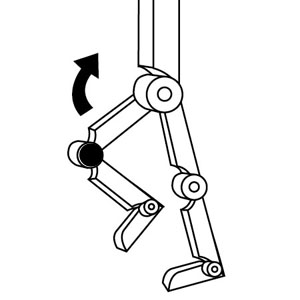
При переводе стика (потенциометра) в положение "вверх" ("вперед"), либо получении сигнала "100%" произвести сервомашинками следующие действия:
1. поднять левую ногу
2. перевести левую ногу вперед
3. перевести правую ногу назад
4. опустить левую ногу
5. поднять правую ногу
6. перевести правую ногу вперед
7. перевести левую ногу назад
8. опустить правую ногу
Установленая галочка LOOP указывает на то, что скрипт будет повторяться бесконечно, пока стик стоит в положении "вверх".